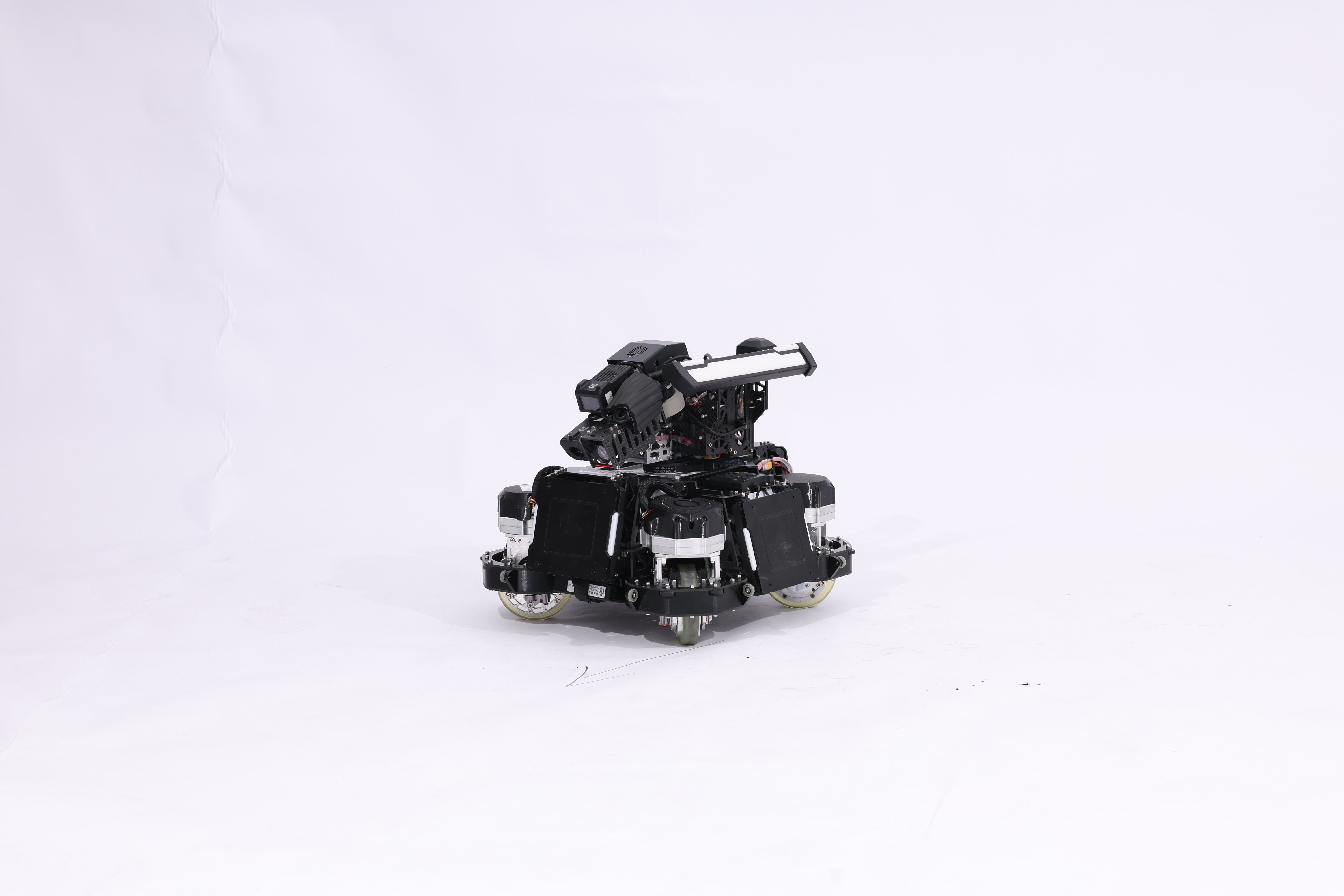
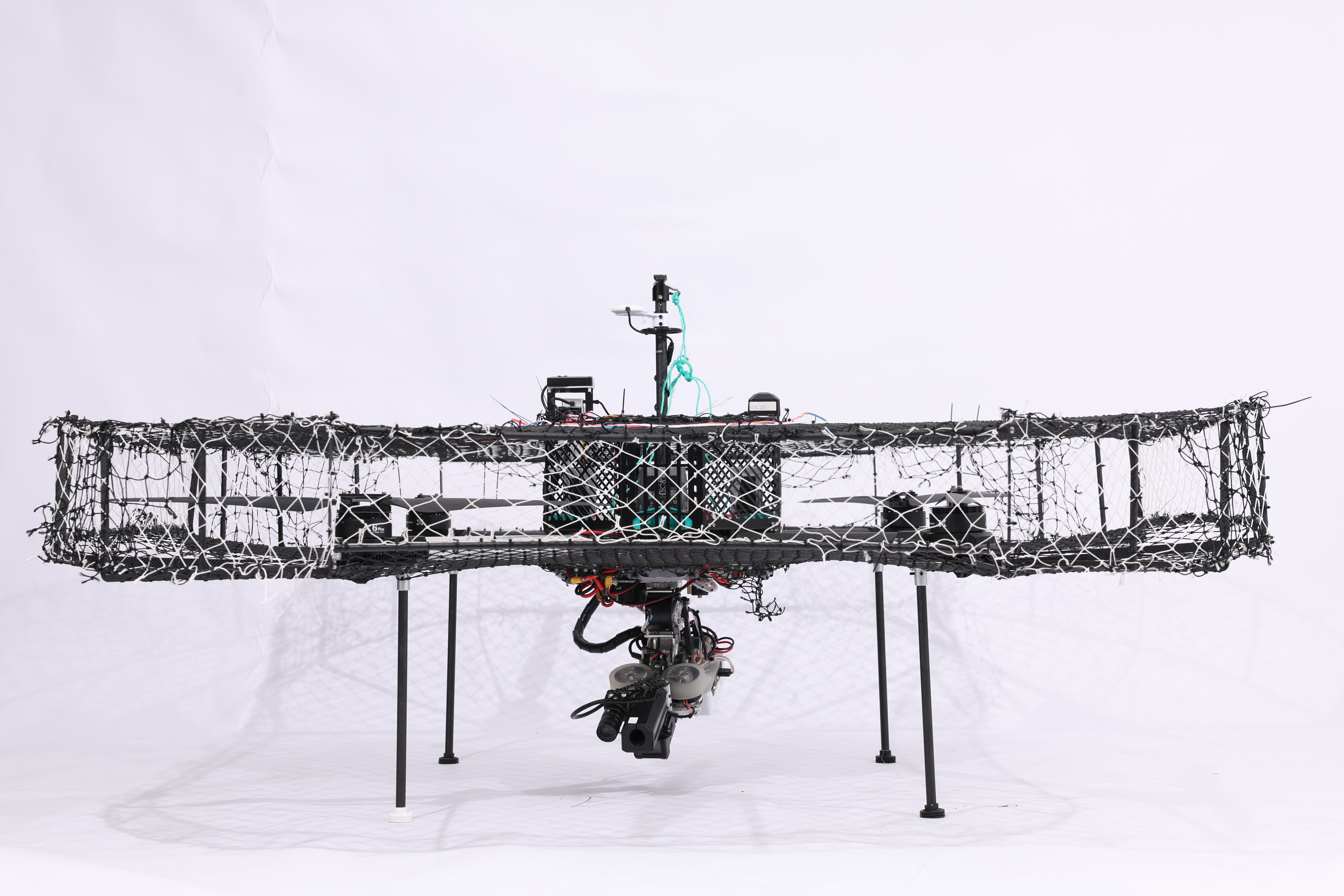
Research研究 4D World Model (MVISTA-4D)4D 世界模型 (MVISTA-4D) View-consistent 4D world model for robotic manipulation — ICML 2026.面向机器人操作的视角一致 4D 世界模型 — ICML 2026。 2025–2026 Memory-Augmented VLA记忆增强 VLA Memory-augmented vision-language-action policy for long-horizon manipulation.面向长程操作的记忆增强视觉-语言-动作策略。 2026– Indoor Semantic Segmentation室内结构语义分割 Point-cloud structural segmentation with Sonata + PTV3, plus a Blender labelling plugin.基于 Sonata + PTV3 的点云结构分割,并自研 Blender 标注插件。 2025–2026 RoboMasterRoboMaster HKUST RoboMaster ENTERPRIZEHKUST RoboMaster Enterprize 战队 Mechanical Department Lead — RMUC 2024 International Champion · 2025 University League Champion机械部门负责人 — RMUC 2024 国际赛区冠军 · 2025 高校联盟赛冠军 2023.11 – 2025.08 Wheel-leg Infantry轮腿步兵 Wheel-leg infantry I led as mechanical designer — Best Knight, RM2025.我主导机械设计的串联腿步兵 — RM2025 最佳骑士奖。 2024 – 2025 Sentry #77 号哨兵 Auto-targeting sentry robot — mechanical design.自动瞄准哨兵机器人 — 机械设计。 2024 Dual-head Sentry双头哨兵 Twin-turret sentry variant — newest iteration.双炮塔哨兵新一代 — 最新迭代。 2025 Rudder-wheel Infantry舵轮步兵 Steering-wheel-driven infantry chassis.舵轮驱动步兵底盘。 2024 – 2025 Drone #66 号无人机 Quadcopter aerial unit for combat support.作战支援四旋翼无人机。 2024 Year Project学年项目 RFID Smart Reagent Cabinet智能 RFID 试剂柜 WeShareTech internship — RFID-based smart-weighing system for laboratory reagent management.WeShareTech 实习 — 基于 RFID 的实验室药剂智能称重管理系统。 2024.10 – 2025.01 Omnidirectional Autonomous Wheelchair全向自主移动轮椅 Team-led Year-2 project — rudder-wheel chassis with LiDAR-based autonomous navigation.Year 2 团队负责人项目 — 舵轮底盘 + 激光雷达自主导航。 2024.09 – 2025.06 Coursework课设 Magnetic Mechanism磁力机构 Mechanism-design course project — magnetic actuator design and prototype.机械设计课程项目 — 磁力执行机构方案与样机。 2024 Bionic Fish仿生鱼 Course project — biologically-inspired underwater swimmer with built prototype.课程项目 — 仿生水下游动机器人,含完整实物样机。 2025 6-DOF Underwater Autonomous Robot6 自由度水下自主导航机器人 Full-stack — mechanical, embedded cascade PID, and YOLO-based underwater perception.全栈开发 — 机械结构、嵌入式级联 PID 控制、基于 YOLO 的水下感知。 2025.08 – 2025.12