Rudder-wheel Infantry舵轮步兵
Steering-wheel-driven infantry chassis.舵轮驱动步兵底盘。
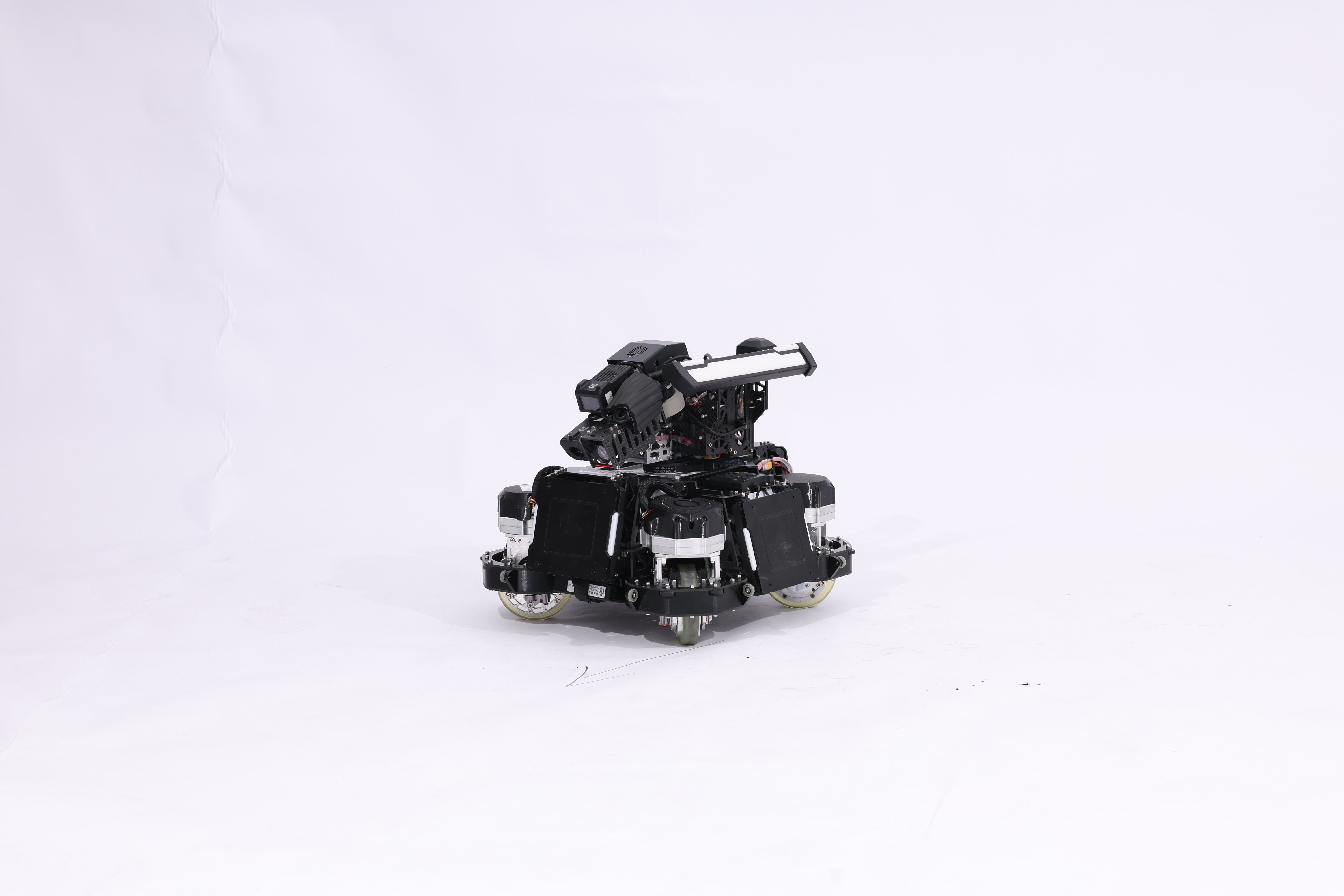
Rudder-wheel (swerve-drive) infantry — each wheel is independently steered for omnidirectional motion and tight in-place rotation. It shares a modular goose-neck turret with the serial-leg platform through standardized interfaces — a deliberate cross-platform reuse that cut the mechanical team’s workload.
The low-inertia turret runs DM4310 motors on both axes: a formula-sized synchronous belt on Yaw (RA5008 crossed-roller bearing) and a backlash-free Pitch with no gravity compensation for crisp vision tracking. It detaches from the chassis via six XT30 connectors and six screws for rapid field maintenance. I worked on the rudder-wheel steering system and the turret–chassis interface (open-sourced).
舵轮(全向)步兵——每个轮独立转向,实现全向运动与原地旋转。它通过标准化接口与串联腿平台共用模块化鹅颈云台——这一跨平台复用刻意降低了机械组的工作量。
低惯量云台两轴均用 DM4310 电机:Yaw 采用按公式定长的同步带(RA5008 交叉滚子轴承),Pitch 不做重力补偿、消除回差以保证视觉跟踪的灵敏。云台可通过 6 个 XT30 接头与 6 颗螺丝与底盘快速分离,便于场边维护。我负责舵轮转向系统与云台–底盘接口(已开源)。